首页
关于顺禾
公司简介
组织架构
发展历程
荣誉资质
合作伙伴
顺禾文化
产品中心
超声波雷达
车载摄像头
360全景
行车记录仪
疲劳驾驶
电子后视镜
定制化数字泊车雷达
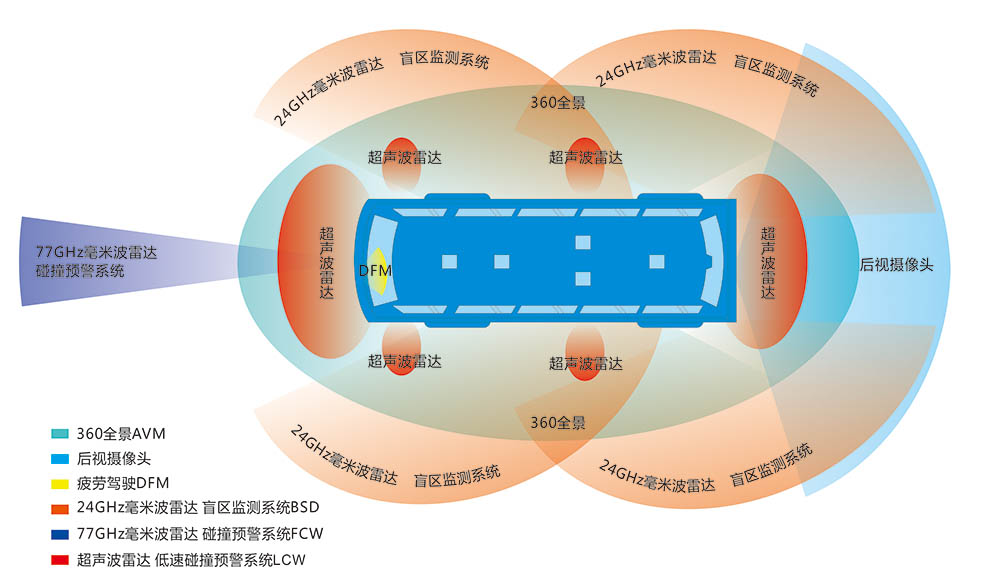
客车雷达
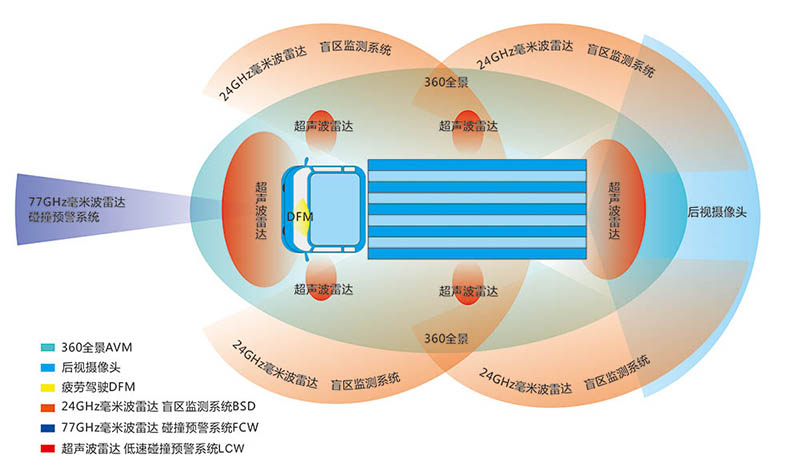
货车及特种车雷达
后装泊车雷达
定制化摄像头
后装摄像头
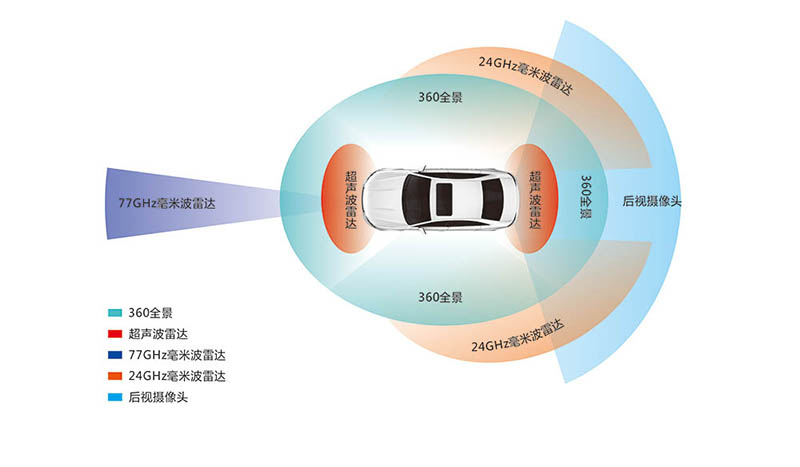
乘用车全景
客车全景
货车及专用车全景
定制化记录仪
后装记录仪
技术研发
研发团队
研发能力
研发成果
研发能力
智能制造
制造基地
制造能力
品质控制
新闻中心
公司动态
服务支持
常见问答
意见反馈
下载中心
人力资源
人才理念
人才招聘
联系我们
搜索
热线:+86-755-29952811
简体中文
简体中文
English
您的位置:
首页
>
Product
>
Ultrasonic sensor
>
Digital parking sensor
prev
next
S521
FRONT PARKING SENSOR, also known as front parking radar, front radar or front radar, is used to detect the distance of obstac
电话咨询
13501553161 13760497022
微信客服
QQ咨询
在线咨询:420022879
在线咨询:34799734
回到顶部